


Подключение контроллера с использованием переходника Ethernet-LPT
1 Настройка для работы программы Mach3 с Ethernet- контроллером(переходником Ethernet-LPT) Моделист -L1.
1.1 При использовании переходника Ethernet-LPT, необходимо скопировать файл mach3usb.dll в папку c:\mach3\plugins.
Скачать mach3usb.dll, файл в архиве ZIP
1.2 Для работы контроллера необходимо произвести настройку сетевого подключения.
Подключием один разъем RJ45 патч-корда непосредственно к персональному компьютеру или маршрутизатору, другой к сетевому разъёму контроллера.
Включаем источник питания контроллера.
После подачи питания на вход контроллера светодиод установленный на плате контроллера должен замогать красным светом. После завершения
самотестирования устройства светодиод загорается зелёным свечением.
При подключении к контроллеру патч-корда (кабелия светодиод Link должен загореться. Если он не загорается или мигает и в Windows появляется/пропадает значок сетевого соединения, значит автоматическое определение типа кабеля прошло неверно (это вызвано особенностью некоторых сетевых карт). В этом
случае, требуется настроить параметры вручную, для этого войдите в меню «Пуск»
– Панель управления – Центр управления сетями и общим доступом
– Подключение по локальной сети – Свойства».
Далее нажмите «Настроить» (Рис. 1). В окне «Дополнительно» выберите
«Скорость и режим работы дуплекса» и установите значение «100Мбит/с полный дуплекс» (Рис. 2). (Параметры и названия в различных сетевых картах могут незначительно отличаться друг от друга).
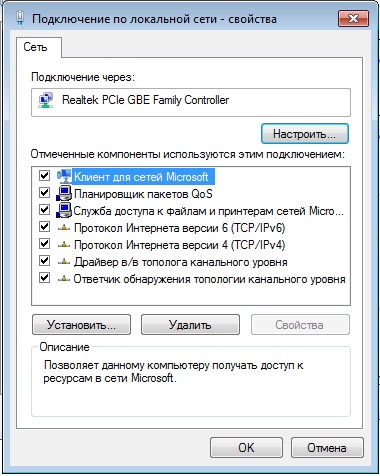
Рисунок 1.
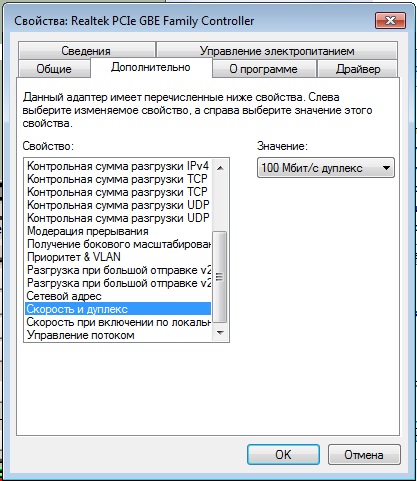
Рисунок 2.
Произведите настройку сетевого подключения.
Войдите в меню Пуск — Настройка — Панель управления —
Сетевые подключения.
Выберите подключение, которое намерены использовать для работы с контроллером.
Двойным щелчком левой кнопки мыши откройте окно свойств подключения, рисунок 12.
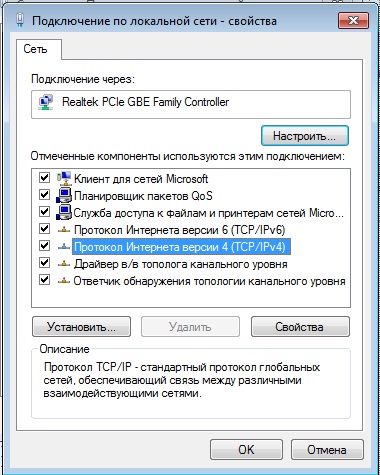
Рисунок 3.
Выберите Протокол Интернета TCP/IP (Протокол Интернета TCP/IP v4) и нажмите Свойства. В открывшемся окне переставьте
переключатель в положение использовать следующий IP-адрес, рисунок 4.
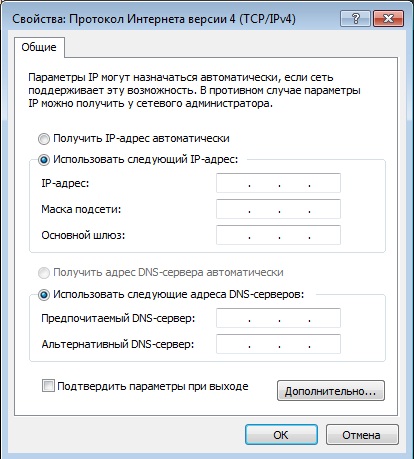
Рисунок 4.
В строке IP-адрес впишите любой адрес вида 192.168.1.XX, например, 192.168.1.5. Последнее число может быть любым,
отличным от 55 (192.168.1.55 - предустановленный производителем адрес для устройства Моделист-L1).
Маска подсети – 255.255.255.0. рисунок 5.
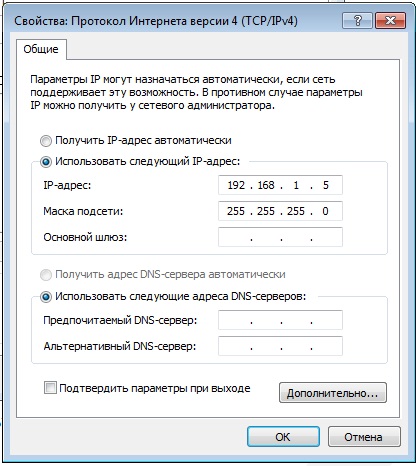
Рисунок 5.
После нажатия кнопки Ok потребуется некоторое время на применение параметров.
По умолчанию Ethernet-контроллеры Моделист- L1 имеют предустановленный адрес 192.168.1.55, поэтому для успешного соединения IP
компьютера долженнаходиться в той же подсети.
Отключите Брандмауэр и антивирусное ПО (или добавьте MACH3 в исключения).
Для корректной работы с контроллером не рекомендуется ставить переключатель в положение «Получить IP-адрес
втоматически».Установка автоматического присвоения адреса будет работать с контроллером только в случае наличия в сети локального
DHCP сервера. Во всех остальных случаях контроллер не установит связь с плагином.
При запуске программы управления станком MACH3 потребуется выбрать из списка устройств, рисунок 7
Производим настройку плагина. Для этого выбираем в меню “Config” пункт «Config plugins”, рисунок 8.
1.3 Конфигурация плагина mach3usb для USB-LPT адаптера.
Нажимаем кнопку “Reset”, Mach3 устанавливает связь с адаптером. Производим настройку плагина. Для этого выбираем в меню “Config” пункт "Config plugins”, рисунок 4.
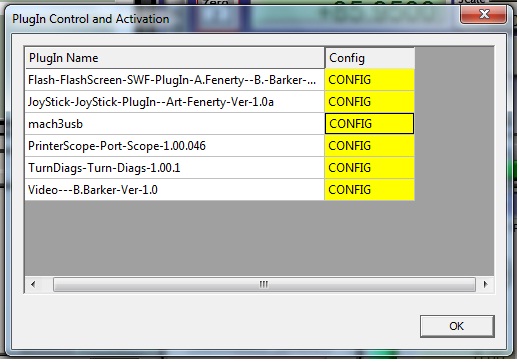
Рисунок 4.
Нажимаем кнопку “Config” напротив “mach3usb”, открывается окно конфигурации плагина, рисунок 5.
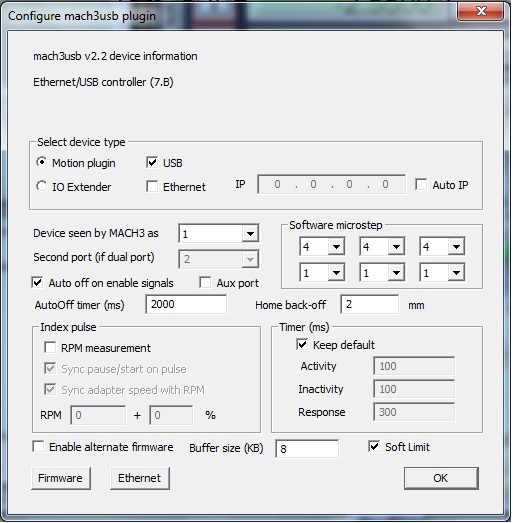
Рисунок 5.
Нажимаем кнопку “Config” напротив “mach3usb”, открывается окно конфигурации плагина, рисунок 6.
 .
.
Рисунок 6.
В верхней части окна плагина расположена панель идентификации подключённого устройства.
На во второй строке отображается тип подключенного устройства и версия прошивки микроконтроллера.
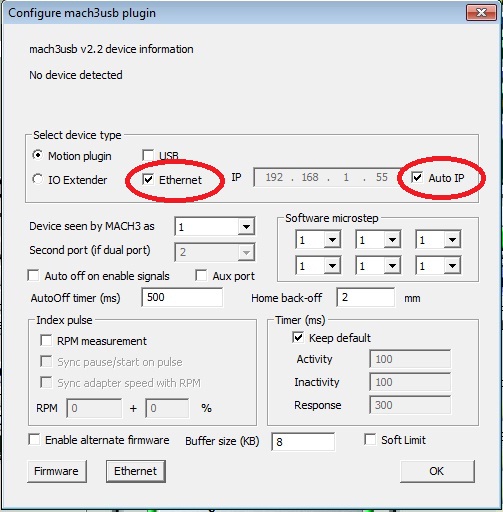
Устанавливаем в чекбоксах отметки “Ethernet” и “Auto IP” и нажимаем кнопку OK, закрываем окно настройки плагина.
Инициализация Ethernet соединения в Mach3 осуществляется нажатием кнопки “Reset” (E-stop).
Просто нажмите дважды «RESET» для отключения / повторного подключения.
Нажимаем кнопку“Reset” (E-stop). Если настройки сети верны, то программа должна установить связь с контроллером, о чём свидетельствует изменение цвета
свечения светодиода на синий.
Изменение сетевого адреса. Открываем плагин -рисунок 7.
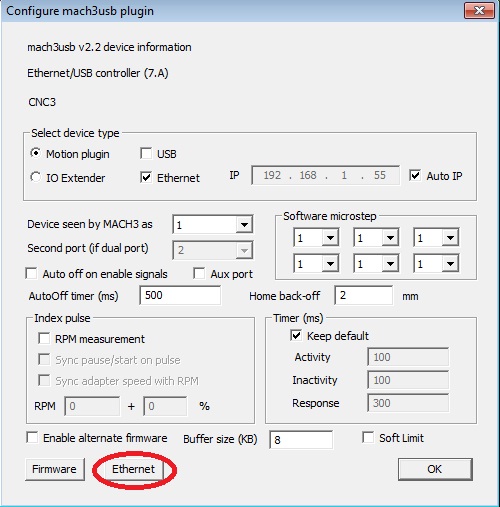
Рисунок 7.
Нажмаем кнопку "Ethernet", открывается диалоговое окно изменения сетевого адреса.
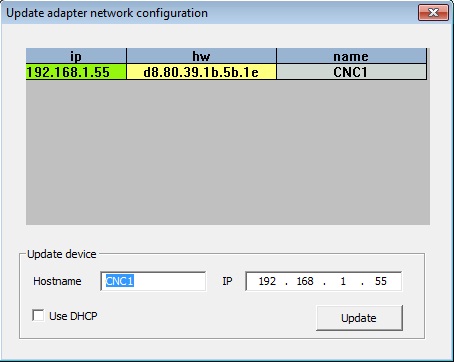
Рисунок 8.
Выберите контроллер из списка (если их несколько).
Произведите изменение данных (IP-адрес, DHCP, имя хоста) Нажмите кнопку "Update". Контроллер автоматически перезагрузится с новыми сетевыми
настройками.
Примечание: Максимальная длина имени хоста 8 знаков.
1.4 Настройка панели микрошага "Software microstep” (программная интерполяция шага).
Программная интерполяция шага двигателя позволяет обеспечить более точный временной контроль, особенно при работе на малых скоростях. Движение будет более гладким и с более низким уровнем шума. При использовании программного мультипликатора шага двигателя в "Motion plugin”, Mach3 будет работать как будто параметр "StepPer" в настройках шаговых двигаталей выше, чем физически, без уменьшения максимальной скорости . При N= 1 параметры работы шаговых двигателей станка соответствуют установленным в пункте меню "Motor Tuning”.
Введите коэффициент мультипликации N> 1, рисунок 9 и умножите на коэффициент N параметр "StepPer" в настройках двигателей(Motor Tuning)Mach3, рисунок 10
Рисунок 9
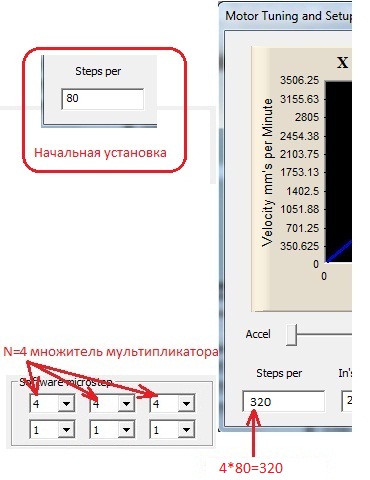
Рисунок 10.
После окончания установки параметров, закройте окно настройки плагина. Далее нажмите "EStop" (Reset) перейдите в режим "Стоп" и заново в режим "Пуск", для перезагрузки параметров адаптера.
4.2 Автоматическое отключение сигнала "Enable"
Автоматическое отключение сигнала "Enable', через установленный промежуток времени, в течении которого не производилось перемещений. Если в поле установлено значение 0, то используется параметр по умолчанию — 500мС. При отключении этой функции сигнал "Enable" отключается нажатием кнопки "E-Stop" (Reset).
1.5 Возврат от концевого выключателя базы (Home).

Рисунок 11.
Устанавливает возврат портала от момента срабатывания концевого выключателя при автоматическом поиске баз по всем осям. (Для исключения ложных
срабатываний при поиске баз, если один входной сигнал используется для нескольких концевых выключателей).
1.6 Использование кнопок "Cycle Start" , "Feed Hold", "Stop'.

Рисунок 12.
При работе плагина:
- нажатие кнопки "Stop" приводит к быстрой остановке выполнения программы, с потерей всего G-кода содержащегося в буфере данных
- нажатие кнопки "Feed Hold", исполнение программы будет продолжаться до исчерпания содержимого программного буфера.
После нажатия "Feed Hold", для корректного продолжения работы нажмите кнопку "Regen toolpath" затем "Run", это обеспечит корректное продолжение программы .

Рисунок 13.
1.7 Таймер.
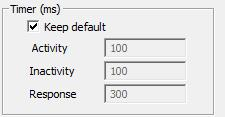
Рисунок 14.
Activity : время пре-буферизации при старте
Inactivity : время детекции состояний Stop/Pause, а так же ресинхронизации индексных импульсов
Response : время передачи команд статуса. Используется для правильной реализации состояний остановка , движение, синхронизация.
При использовании значений по умолчанию, данные введённые в поля значений не используются. Используются значения 100/300/300.
Таймер не распространяется на команды переездов. Команды переездов всегда исполняются сразу.
1.8 Панель настройки индексного входа, рисунок 15.
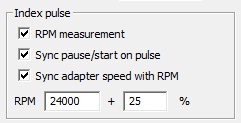
Рисунок 15.
Адаптер имеет конфигурироемый индексный вход -вывод 12.
индексный вход поддерживает следующие функции:
- Измерение числа оборотов шпинделя в минуту и индикации в Mach3 - “RPM measurement”.
- Синхронизация старта с паузы в G-коде по появлению синхроимпульса -“Sync pause/start on
pulse” (в том числе и по нажатию кнопок Pause/Start основного экрана Mach3.)
- Синхронизации скорости подачи инструмента с числом оборотов шпинделя- “Sync adapter
speed with RPM”.
Синхронизация скорости подачи с числом оборотов шпинделя производится средствами
адаптера и соответствует формуле :
А=(А1*В)/В1.
Где: А -подача в данный момент времени;
А1- нормальная подача заданная в G-коде;
В - измеренное значение числа оборотов в минуту шпинделя;
В1- число оборотов шпинделя при нормальной подаче;
Поле RPM – число оборотов при нормальной подаче, поле % -величина превышения числа
оборотов над заданными которая может быть отслежена. Если поле % равно нулю, то подача
всегда меньше или равна нормальной подаче заданной в G-коде.
1.8 Буфер.
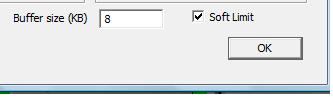
Рисунок 16.
Иногда возможно временное рассогласование между строкой G-кода отображаемой , как выполняемая в Mach3, и фактически исполняемой строкой, а так же задержка исполнения команд Stop, Feed Hold. Это связано с наличием собственного командного буфера адаптера.
Буфер стабилизирует работу при кратковременных сбоях связи между адаптером и компьютером и при замедлении расчёта Mach3. С одной стороны,чем больше буфер тем стабильнее работа, но в связи с тем что объём буфера может достигать десятков килобайт, возможны задержки исполнения команд FeedHold, Stop до нескольких секунд. Вы можете повысить скорость реакции уменьшив значение буфера до 0, но повысится вероятность сбоя при работе.
Рекомендуемое значение объёма буфера 8кБ.